The Motorized Rotating Christmas Tree Stand
Jeremy Elson, December 2018
Why bother decorating an entire tree if people can only see one side of it? The Motorized Rotating Christmas Tree Stand is a ridiculously over-engineered solution to this non-problem. It’s a platform for our artificial tree that rotates very slowly—about three times per hour. It rotates slowly enough that you can’t really see it moving unless you stare at it intently, but every time you look at the tree, there are a different set of ornaments visible.
This was a pretty fun project for me because it was the first time I’d ever built something mechanical. I didn’t really know much what I was doing, so I got a lot of help from my more mechanically-inclined friends, Jon and JD.
The tree sits on a 1/2” thick circular plywood platform. It’s 2’ in diameter, chosen to match the footprint of our artificial tree’s base. The rotating disk sits on a base which is an identically sized plywood disk. The two disks are separated by 5x1.5” casters mounted around the perimeter of the base.
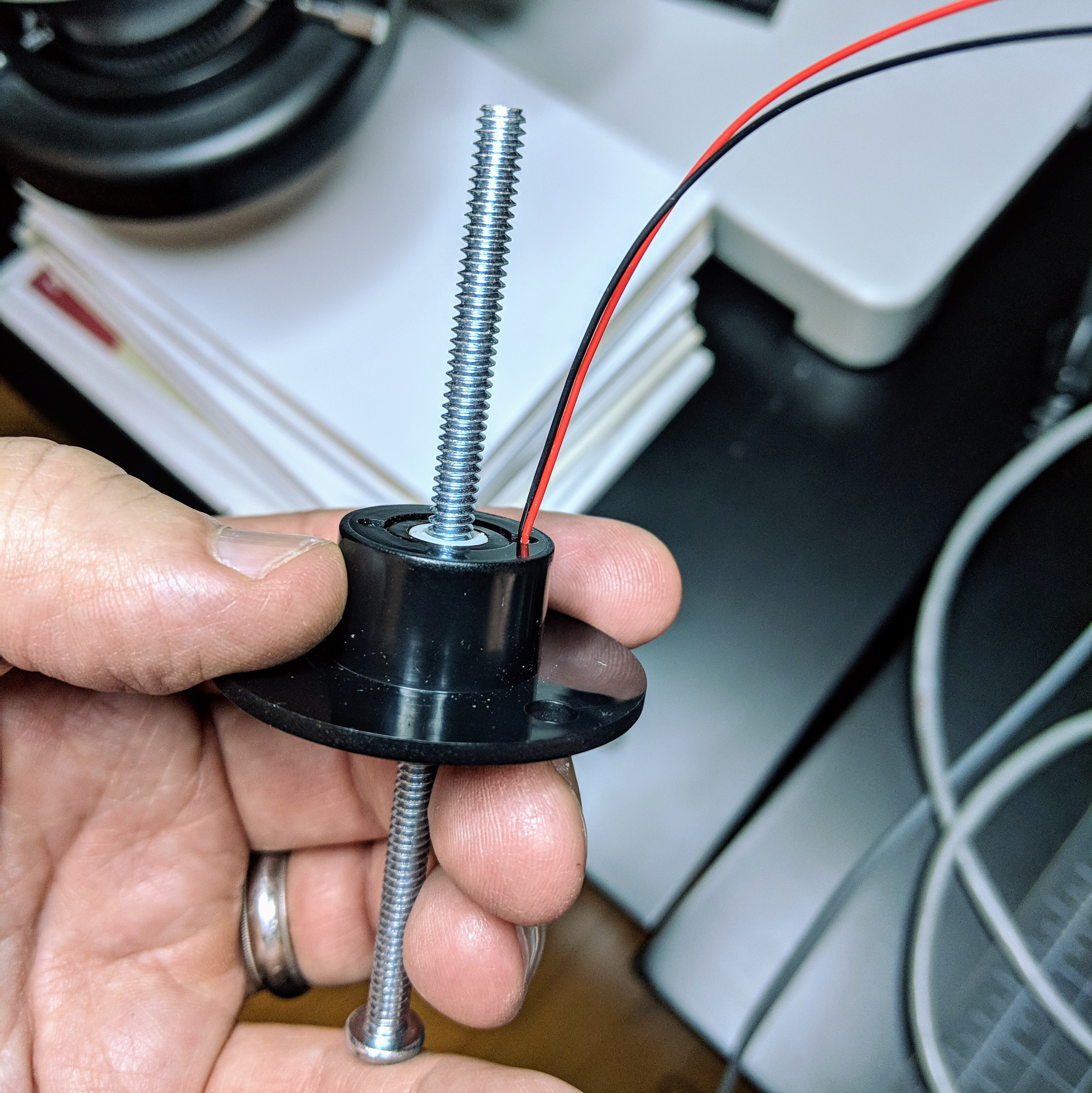
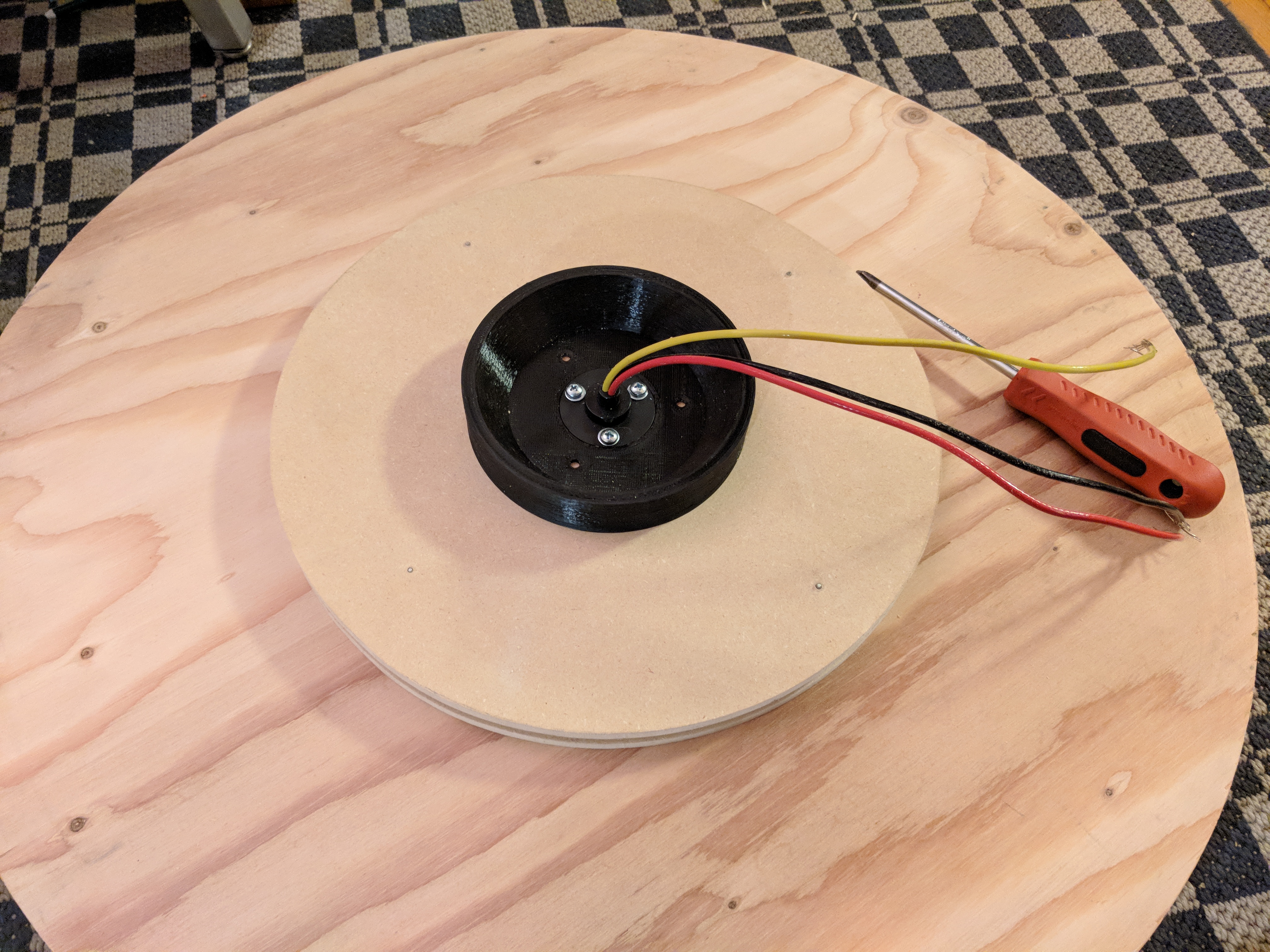
There’s a slip ring in the center of the top disk—that’s a device that can transmit electrical power into something that rotates without any wires getting tangled. It allows us to bring wall power up to the tree for all its lights.
One tricky part of the design was how to keep the top disk centered above the base while it’s rotating. Typically one would just drill a couple of holes in the disks’ centers and put an axle through them. The slip ring makes this more complicated since it needs to be at the axis of rotation, and virtually none of the slip rings I found (for under $100, anyway) were hollow. Jon suggested an alternative approach: a flange mounted to the top disk that mates with skate bearings mounted to the bottom disk. This ended up working perfectly.
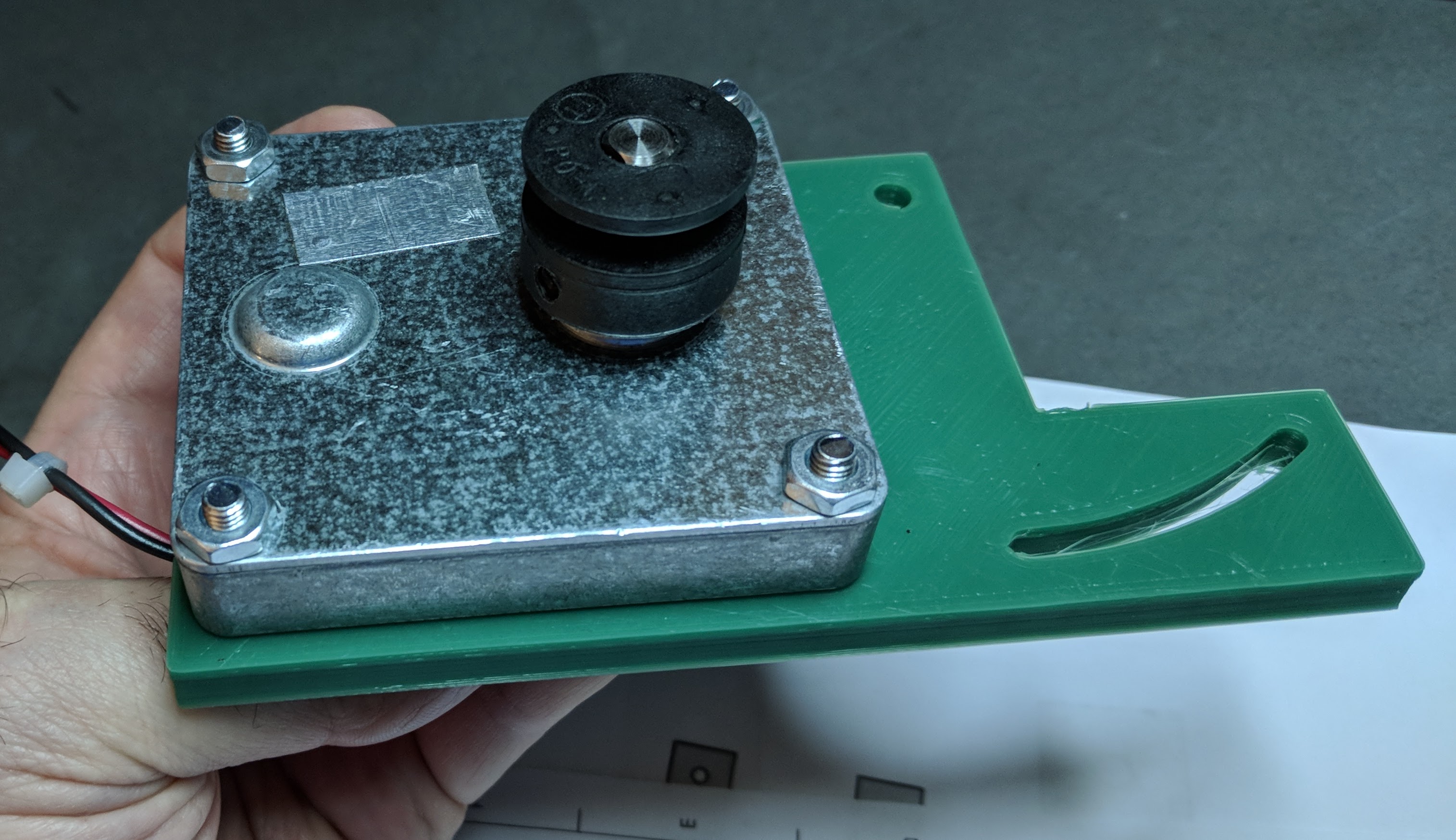
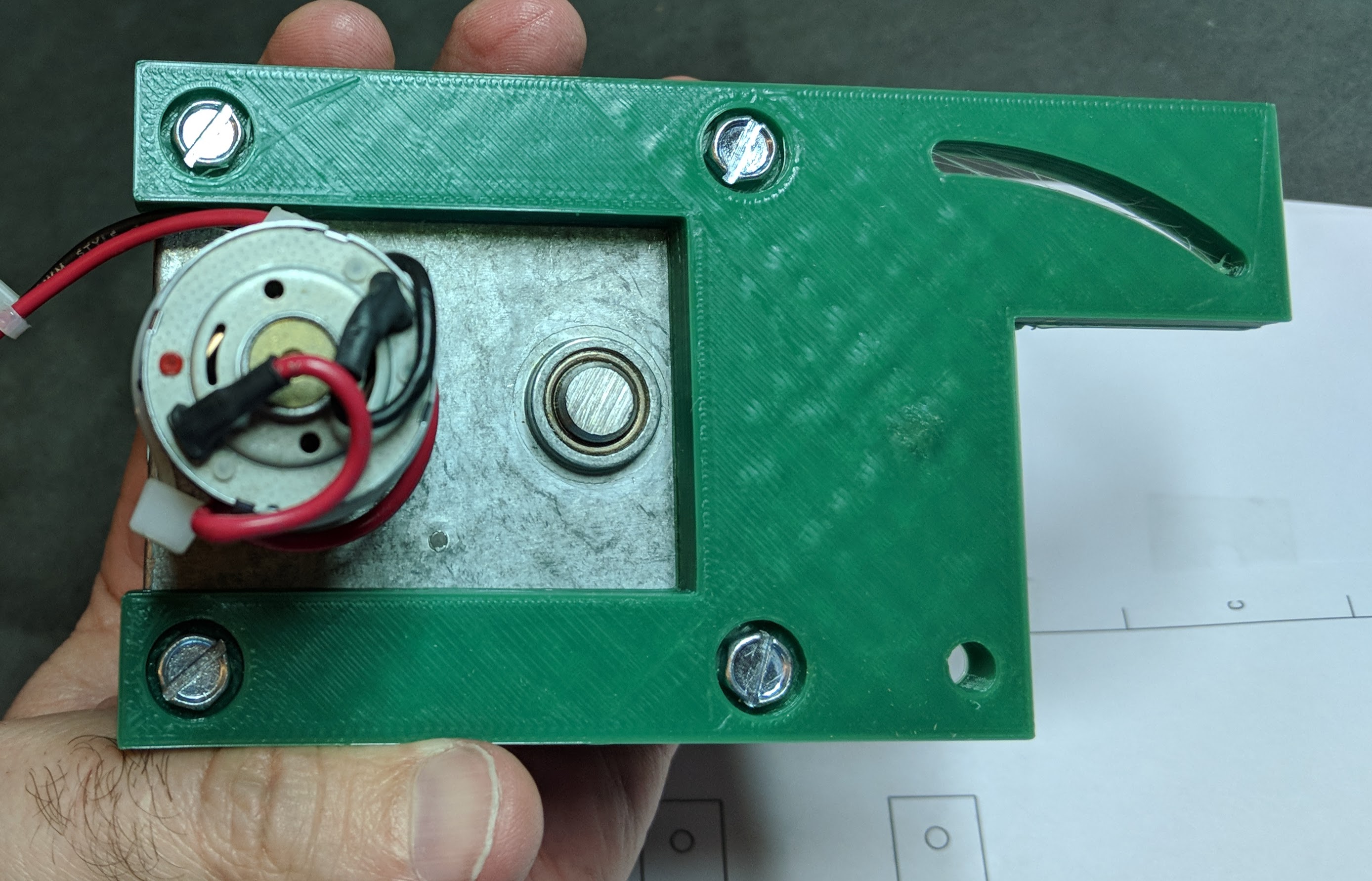
The rotating top platform is powered by a small gearmotor, which is a DC motor with a set of gears built in to give it higher torque and lower speed. The motor is mounted to the base with a custom, 3D-printed bracket. A 3D-printed cog mates with the motor’s drive shaft and a ring gear attached to the bottom of the rotating part of the platform.
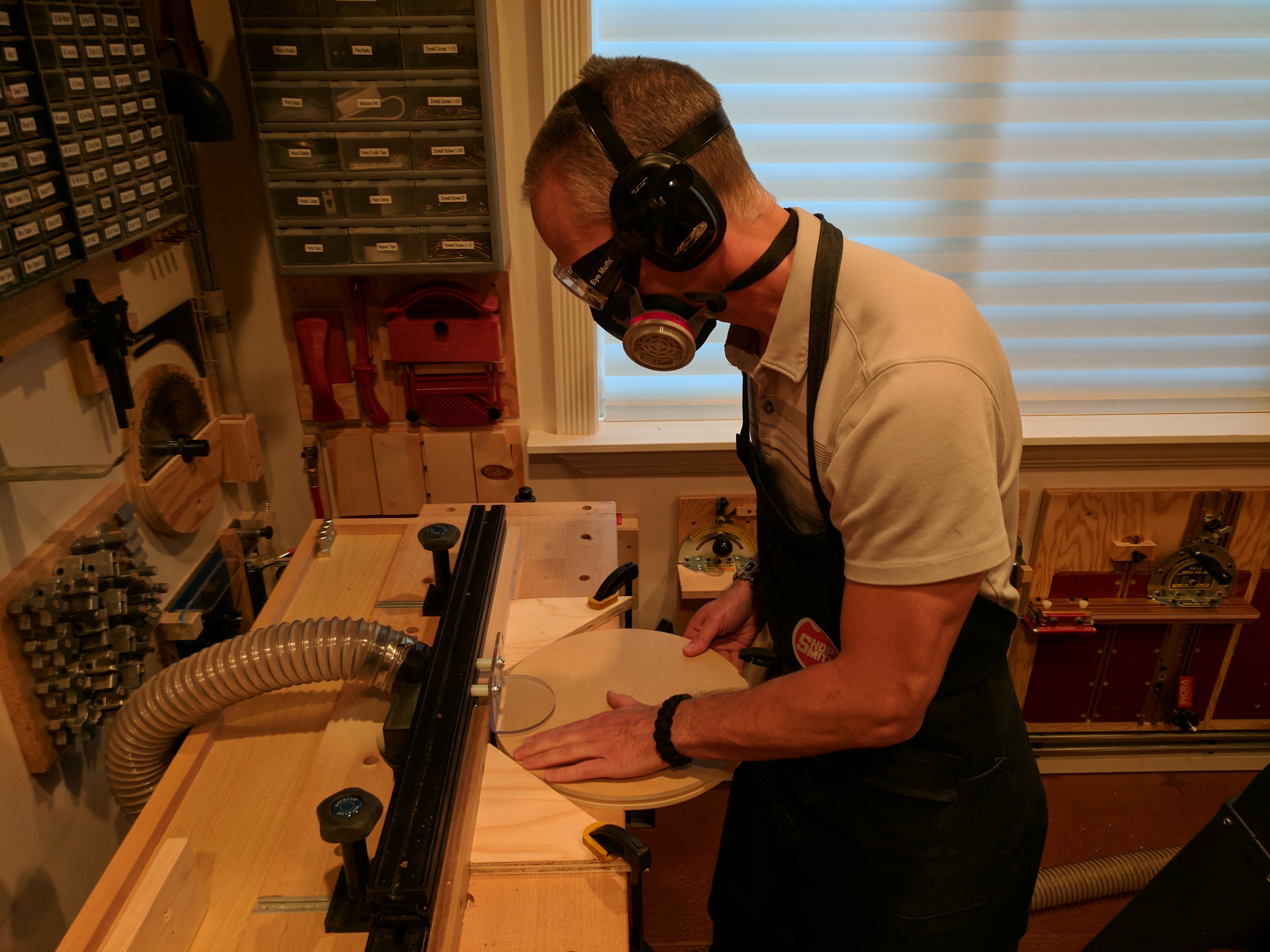
Cutting the wood
The first step was getting two wood disks the right size. Our tree’s base is about 22” wide, so I appealed to my friend JD to cut me two wood disks 24” in diameter. He has a home wood shop and did a fantastic job cutting the disks precisely. He has a multipurpose tool called a Shopsmith that can rotate the work piece around a point. This made a near-perfect circle while conveniently also leaving a little divot showing its exact center.
My original plan was for the platform to be belt-driven, using a “drive disk” attached to the bottom of the tree platform. After a lot of research on belts, which I’d never used before, I decided on “2L”-sized V-belts. I also asked JD to cut me a second disk, 12” in diameter, with a groove in it of the right size to fit a 2L belt. JD used his router to cut a groove that fit the belt perfectly.


Unfortunately, 2L belts ended up being a bad choice for several reasons. One is that the when the platform was under load, the belt kept slipping on the little pulley once I added load to the platform; a 3L belt might have made better contact and would have worked. 2L was also a bad choice because there just aren’t that many 2L-sized belts and belt accessories sold, making it hard to find exactly what I wanted online. The next size up, 3L, has a much better selection, and in retrospect that would have been a better choice.
Assembling the Top Platform
At the core of the top platform was a slip ring, which is a device that lets you create an electrical connection into something that rotates. Ideally, I wanted a hollow slip ring, allowing me to put an axle through the center to keep the top and bottom platforms aligned.
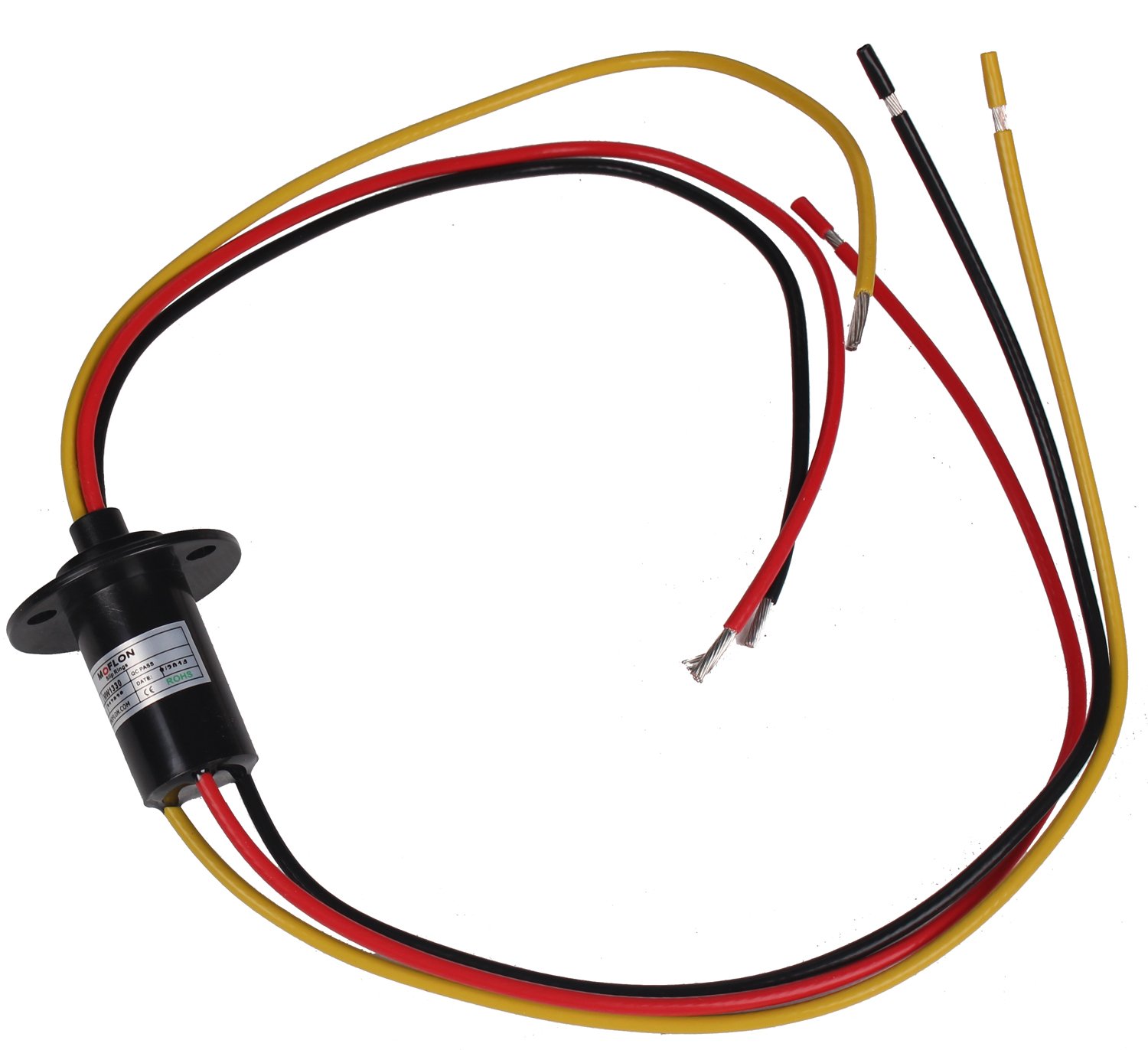
Unfortunately, at the time, the only hollow slip rings I could find were quite expensive. The only one I could find for under $100 was a pretty cheesy one; when it arrived from China via AliExpress, I realized the wires were only 22AWG. Although the manufacturer claimed it was rated for 120VAC at up to 20 amps, I really didn’t want to burn my house down. Instead, I went for a pretty heavy duty slip ring I found on Amazon. It’s meant for building windmills, I think, and is rated for 30 amps at 600 volts. Much better!
I went to Jon’s wood shop and he helped me to drill a centered hole in both the top platform and the grooved drive disk that would accept the drive belt. The hole was sized to fit the slip ring I’d picked out, and we attached the top platform to the drive disk with wood screws.

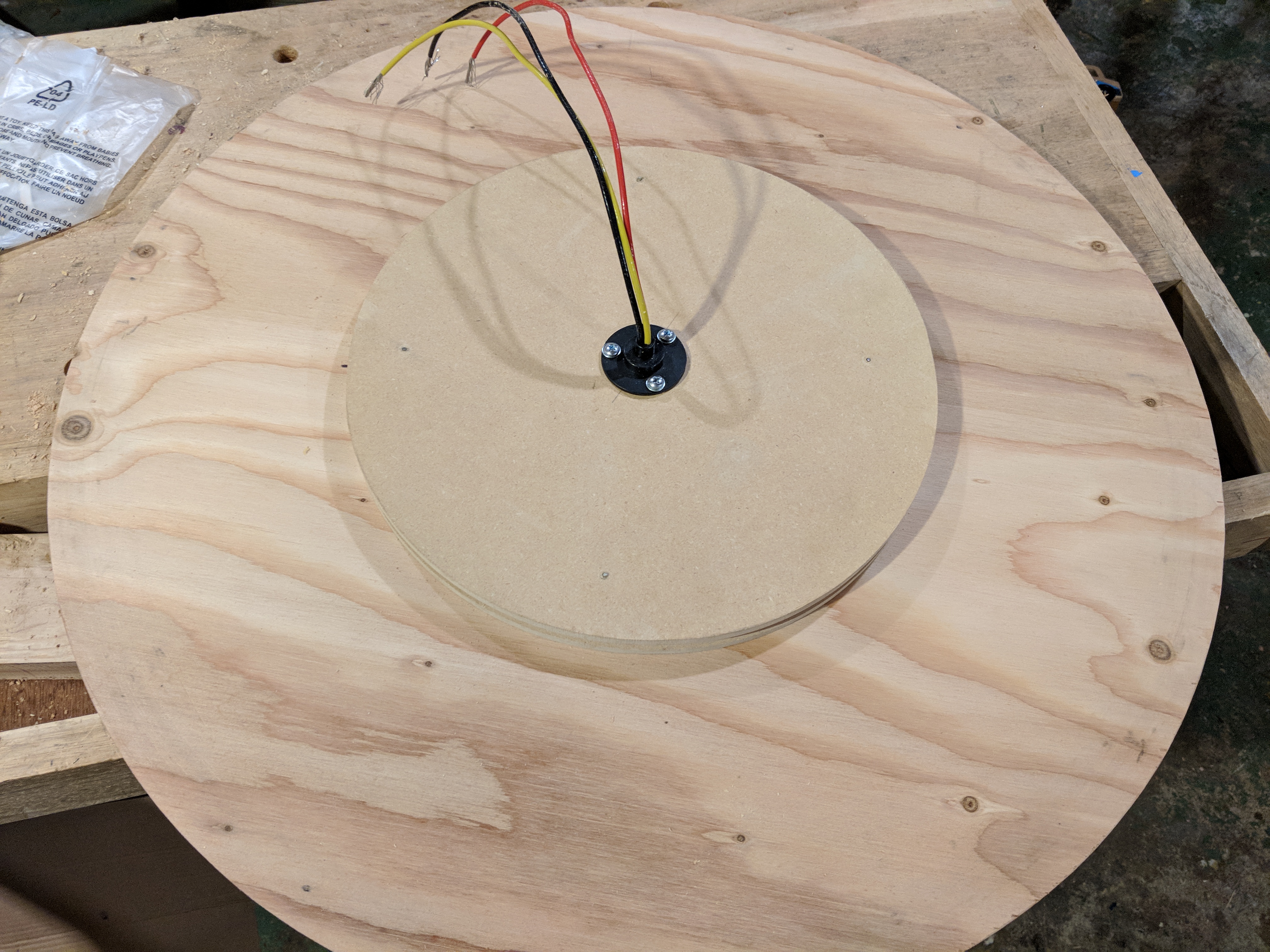
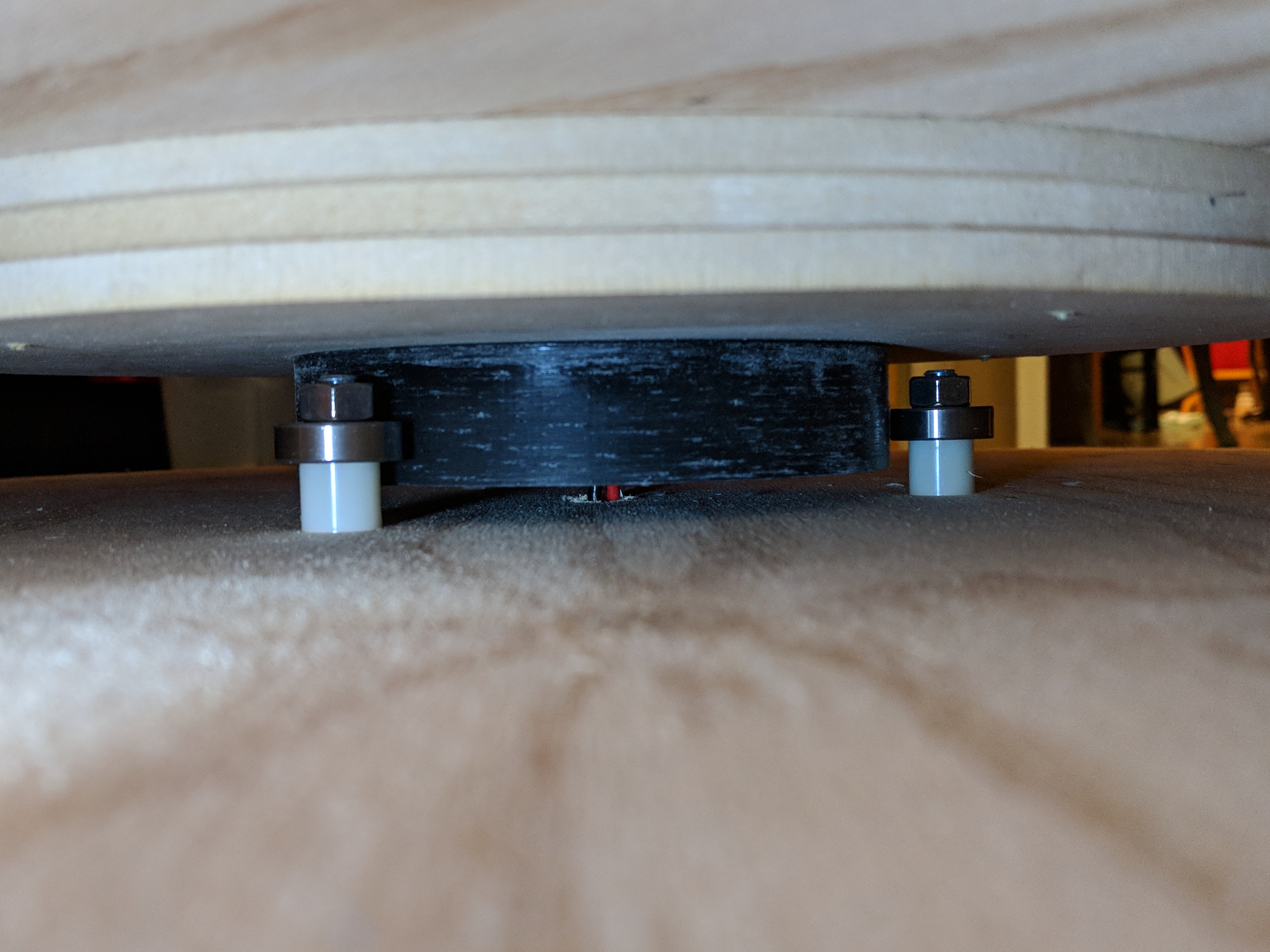
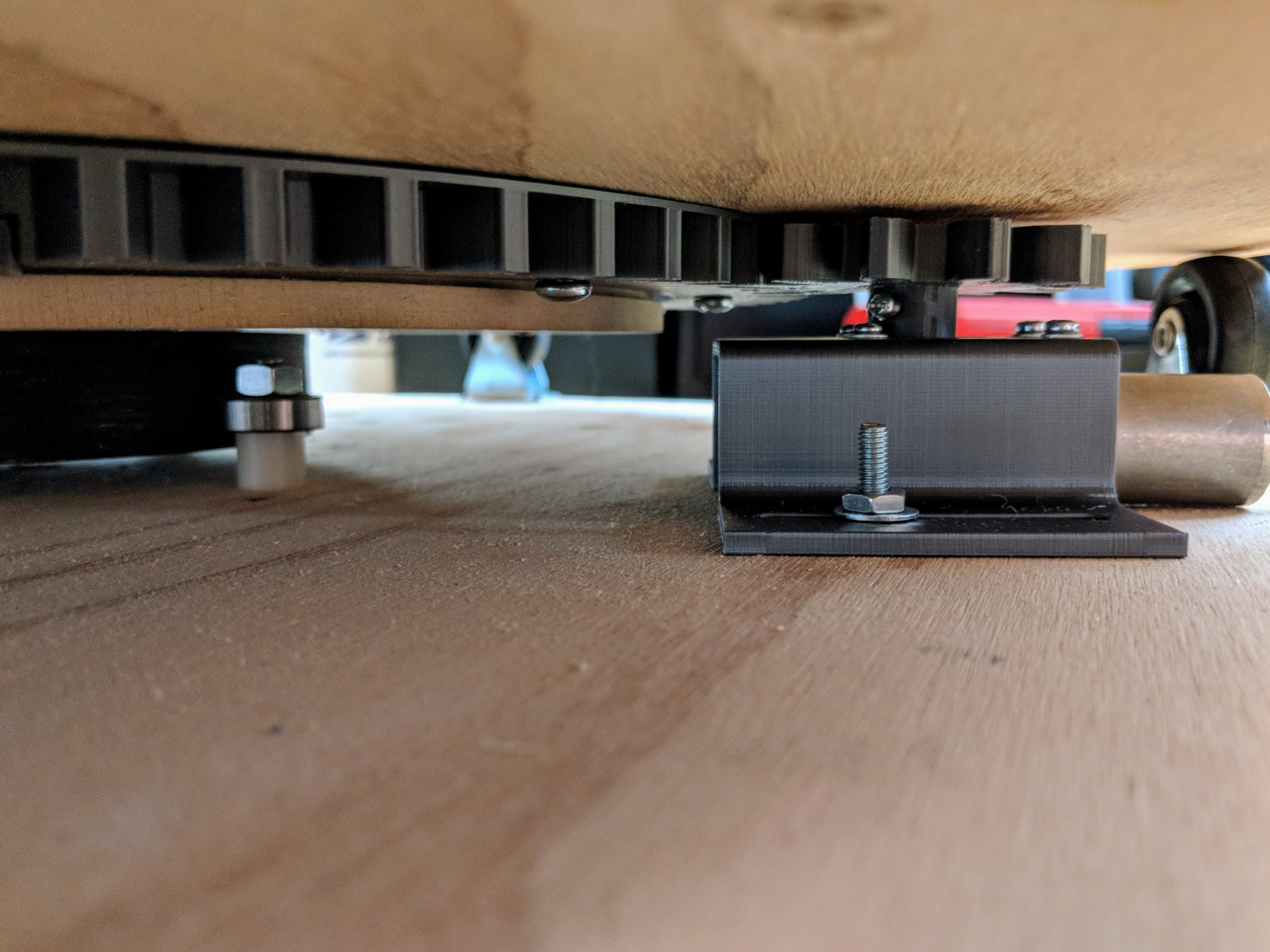
A non-hollow slip ring presented a problem: how do we keep the two disks centered on top of each other? Jon came to the rescue with an excellent suggestion: a third disk with a flange. Originally we were going to have that flange mate with casters mounted horizontally, but that seemed complicated; later, we realized we could probably just use skate bearings mounted on bolts with some nylon spacers.
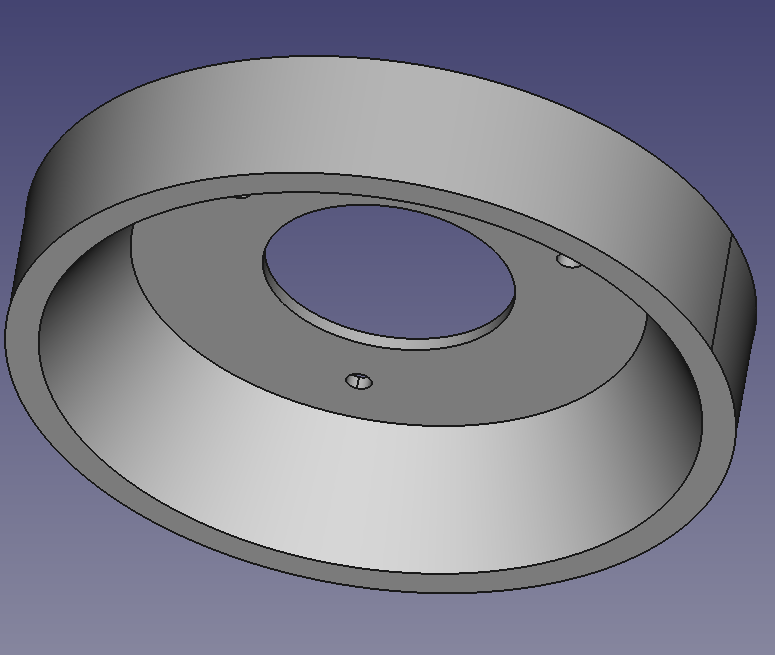
At this point, I’d never really used a 3D printer for anything. Jon had experience with FreeCAD and modeled the flange before we started the woodworking. By the time we were done drilling holes, I was holding the flange in my hand!

Assembling the Bottom Platform
The bottom platform was easy. All it needed was some feet on the bottom so it wouldn’t scratch up the floor, and some casters on the top to let the top platform rotate on top of it. I found some 1.5 inch casters on Amazon. We drilled 3 holes for the bearings to be mounted.
That first time I put the top platform onto the bottom and felt the flange settle into place, mating with the bearings, was pure magic. Jon did an amazing job on the 3D model. There was maybe 1/16” of play laterally on the platform.


Motor Mounts, Versions 1 and 2
The next step—and, at the time, what I thought would be the final step—was to mount the motor to the bottom platform. I designed a motor mount using my new FreeCAD skills I’d learned from Jon. The mount had four counterbored holes for attaching to the motor with bolts; the motor had four threaded through-holes built in. The mount also had two additional holes for attaching it to the bottom platform. One hole was actually a slot so that I’d be able to tighten the belt after installation, using the other hole as a pivot.

I took the motor mount home, drilled a couple of mounting holes in the base, and after a bunch of tinkering was finally rewarded with this amazing view: the platform rotating under its own power for the first time!
My excitement was short-lived. When I placed any weight on the platform, the motor immediately stalled. Nooooooo!
I’d bought a pretty wide selection of little motors, hoping at least one would work. I had another motor that had a much higher gear ratio, but its form factor was completely different, so I had to design a new mount from scratch.
This motor worked better; it didn’t stall, at least. But when I applied any significant weight to the platform, the V-belt started slipping around that little pulley. I just couldn’t tension the belt enough to make it work.
Starting from Scratch with Gears
By that point, it was already the day before Christmas (2017) and I was feeling pretty defeated. I put the project away for several months, frustrated that I hadn’t been able to get it to work right. In the spring, I was ready to pick it up again, and Jon once again came to my rescue. At first, we thought about a little idler pulley to try and tension the belt from the center, but that seemed tricky.
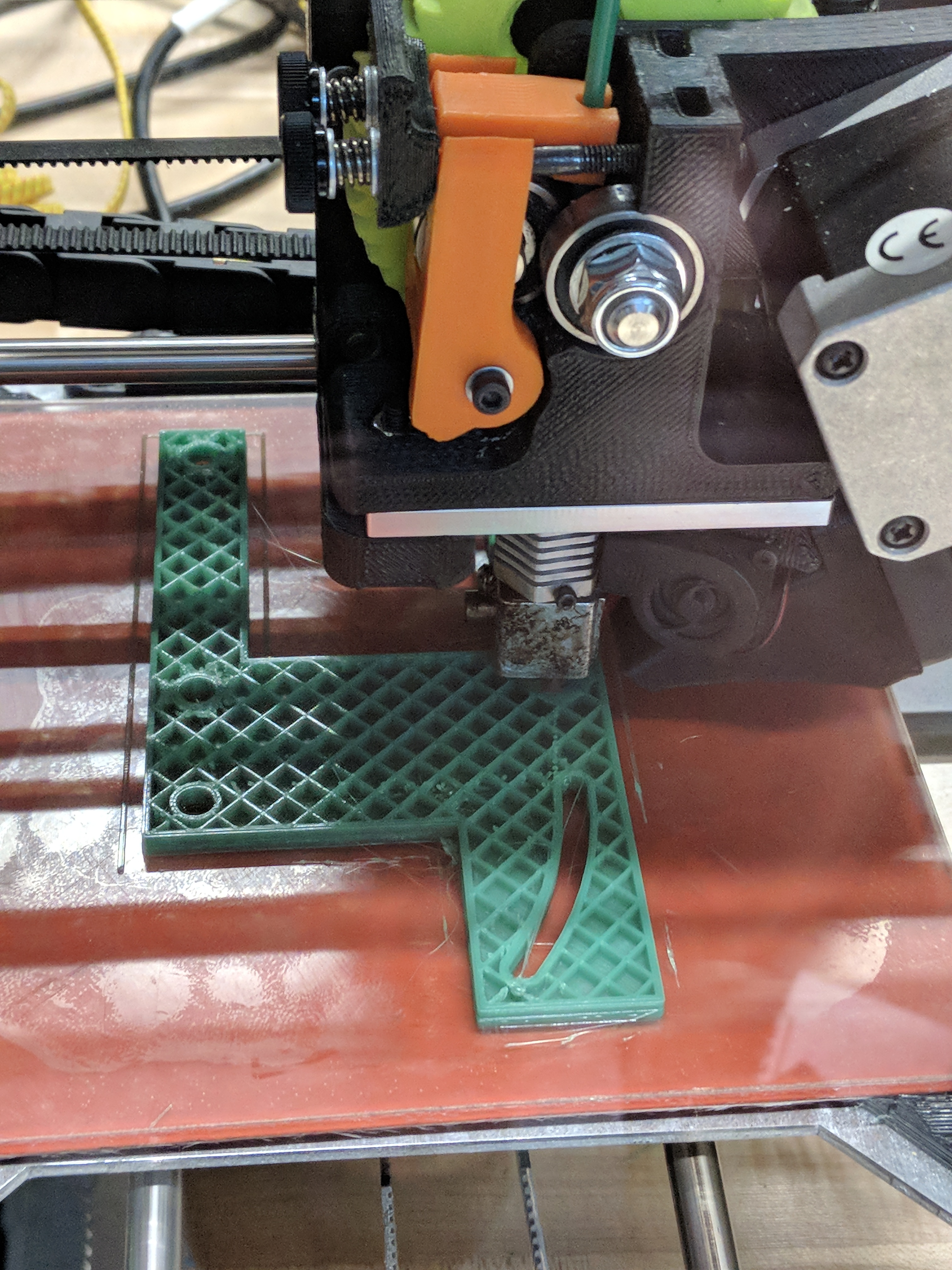
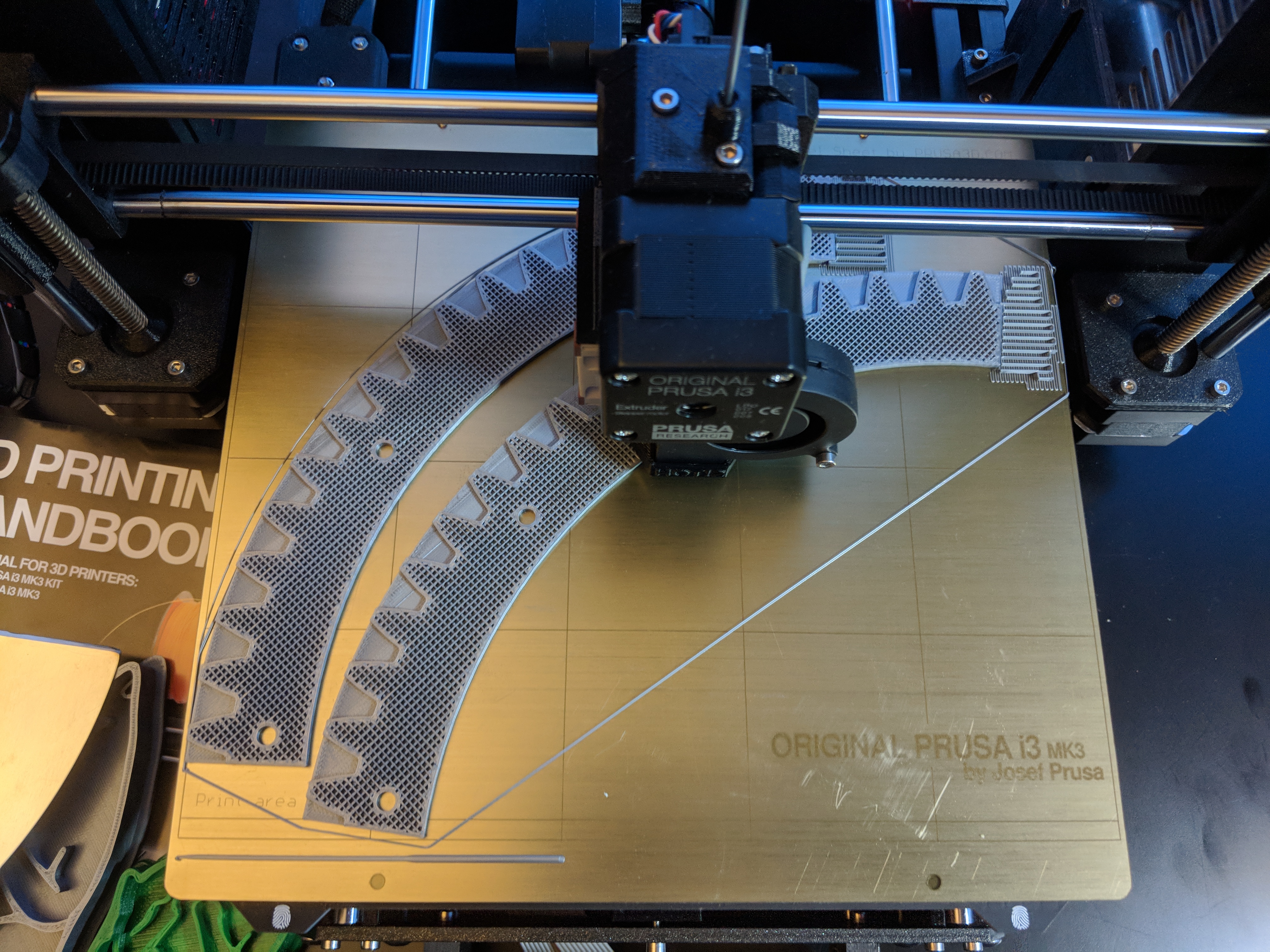
Finally, he suggested that a nice big 3D-printed gear ring might be a better design; there’d be no opportunity for the belt to slip. Making gears out of plastic is usually not the best idea, but in this case we thought we might get away with it. Everything was going to run at low speed, so there wasn’t much chance of anything melting. Plus, making the teeth huge would both ensure generous tolerances for the teeth to mate as well as providing a huge amount of plastic to increase the strength.


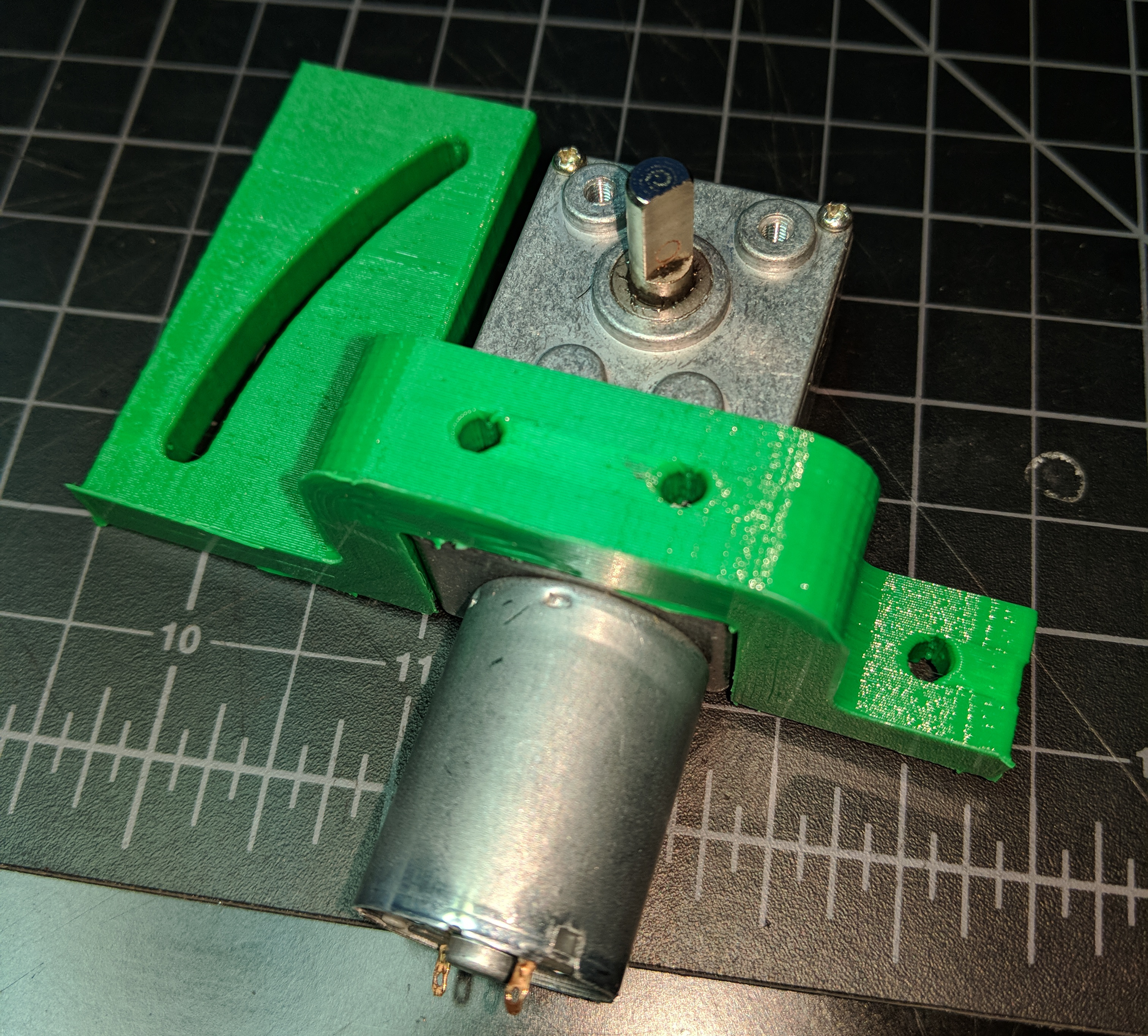
The gears looked great, but I wasn’t too happy with the motor mount. The entire cog might need to move forward and backward to mate properly with the gears, unlike the mount for the old belt system where it was fine to simply move the mount further away from the center in order to tighten it. I created a third motor mount, this one with a slide on each side. I also made it bigger, so it would mate with all four mounting screws on the motor.

At long last I was able to put a significant weight on the platform … and it turned!! It’s hard to overstate just how exciting this was. Here’s a timelapse of the first morning the whole thing worked, in which I now must also admit what I was using as a tree mass simulator: myself.
Final electrical connections
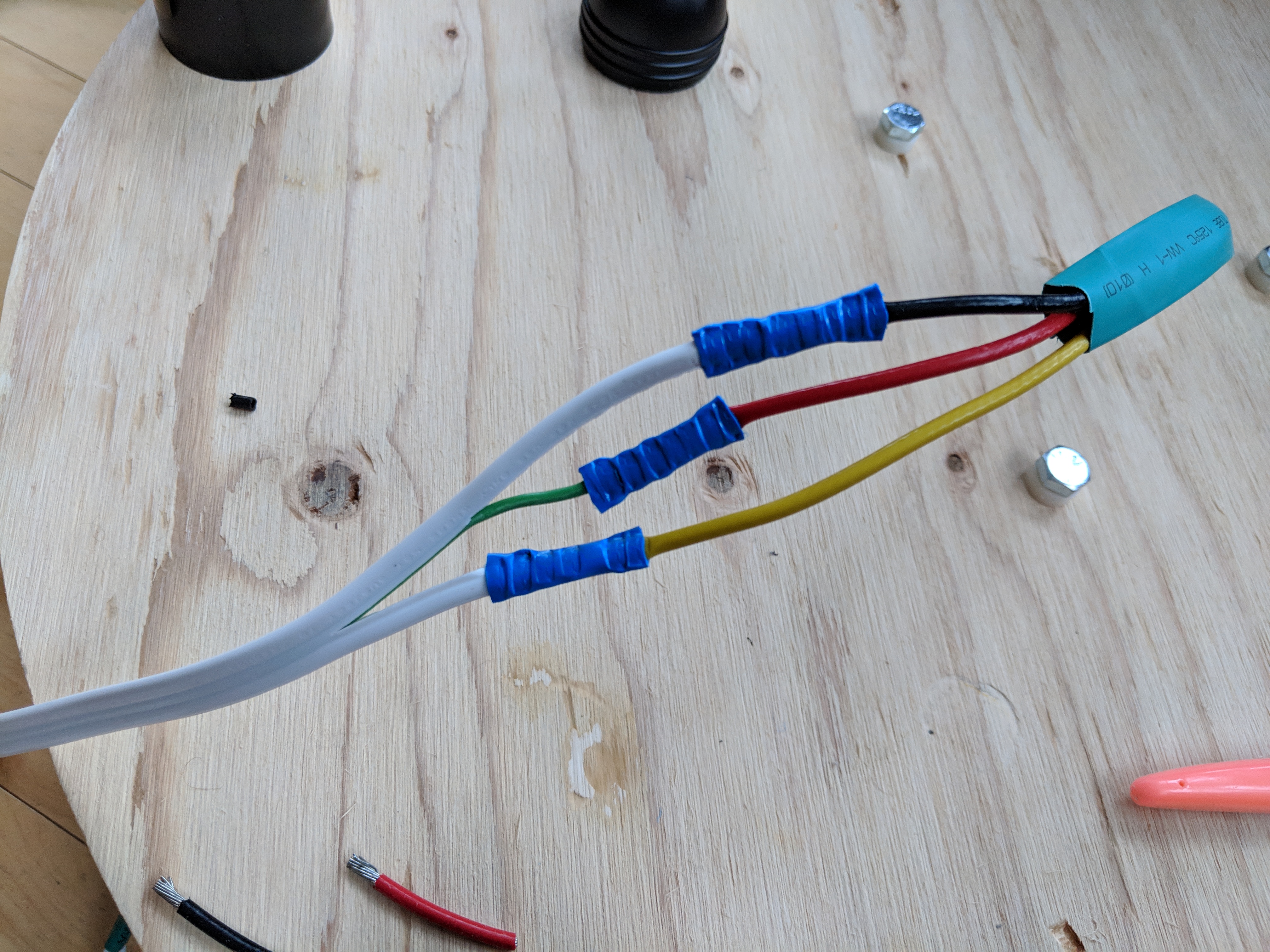
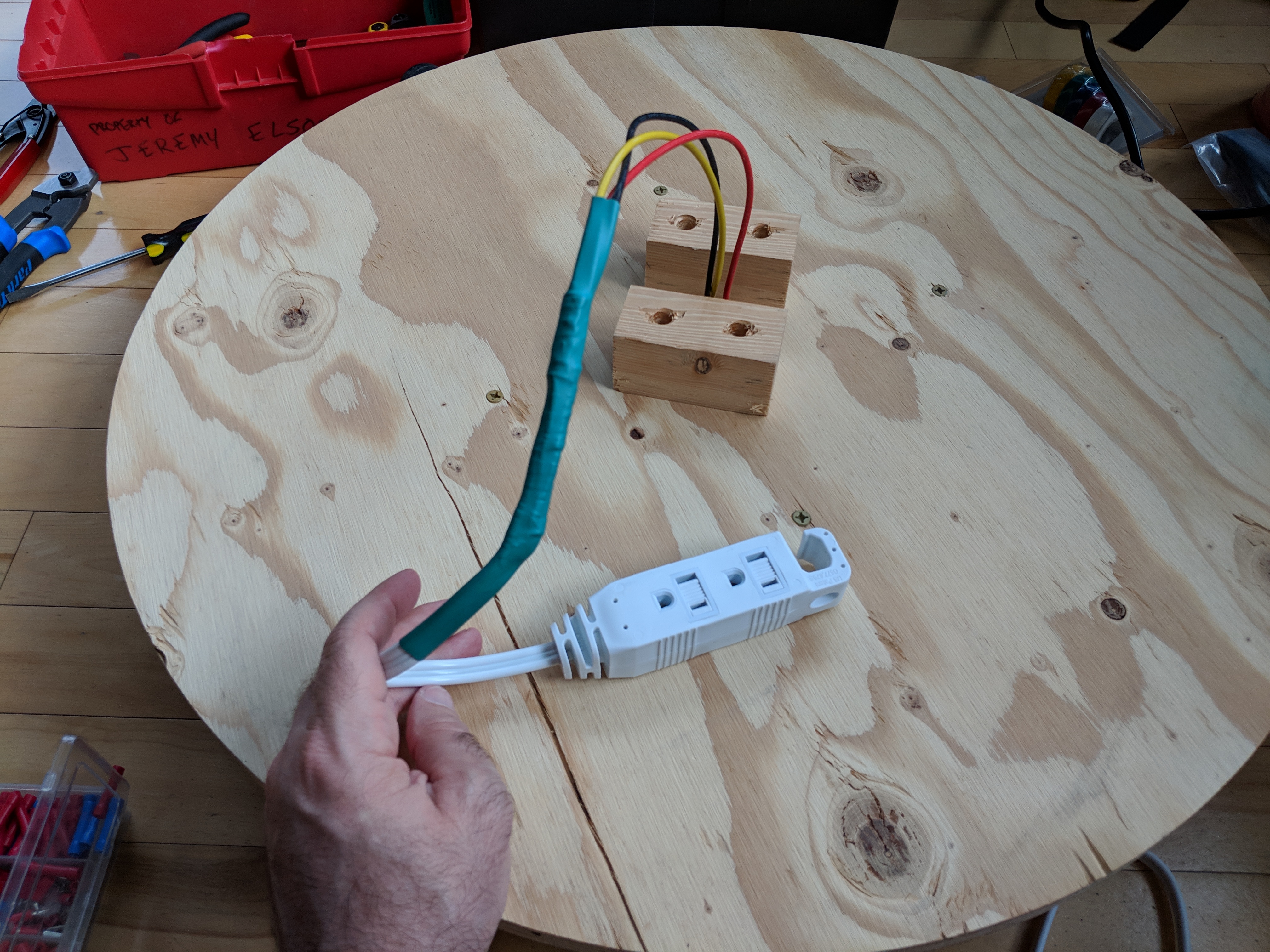
The hard part was now done; all that was left was to make some final electrical connections. The slip ring just had bare wires coming out of it. I converted this into a standard North American power plug using a 6-foot extension cord. I cut the cord in half, spliced the socket half onto the top of the stand, and the plug portion onto the bottom half of the stand. That made it easy to simply plug the stand in to the wall, then plug the tree into the socket on the platform.
The DC gearmotor was powered separately, using a 5 volt wall wart plugged into the wall.
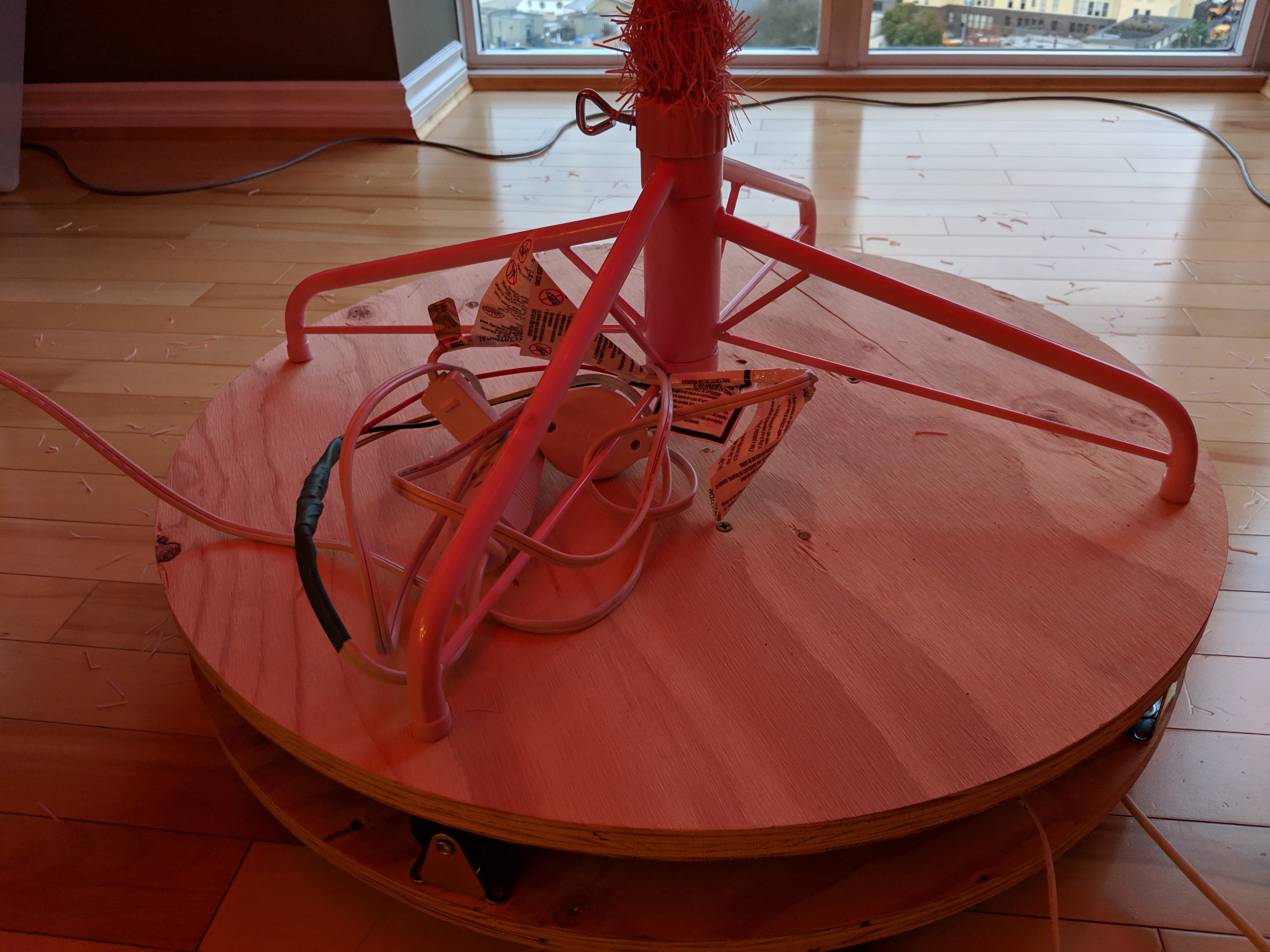
After this, it was all done. Liesl decorated our tree with gusto, plugged it in, added a skirt, and… voila!
Other Design Options
There are lots of ways to make a system like this work. The one I chose worked, but there are plenty of alternatives. Here are a few:
-
A hollow slip ring. Spending a little more money on a hollow slip ring would have made it possible to use an axle instead of 3D printing a custom flange and using skate bearings.
-
Rotating back and forth. Since the tree rotates so slowly, and the goal is just to ensure different parts of the tree are visible at different times, it probably would have been fine to have it rotate once clockwise, then reverse. This would obviate the need for a slip ring at all and make it even easier to use an axle.
-
A bigger belt. If I’d used a larger belt, such as a 3L or 4L, the original belt-driven design might have worked.
-
Just buy the thing. There are rotating stands you can buy, but I wanted to learn how to build mechanical things!
I certainly learned a lot, and by the end I owned my own 3D printer. I leave you with the image below: the graveyard of discarded plastic pieces that didn’t quite work. Good thing PLA is cheap!

Do-It-Yourself Resources
Mini-Stand
The easiest way to get a similar stand is to just print one! Two years after the full-sized stand described here, I made a mini-stand that can be completely 3D-printed!
Full-Sized Stand
If you want to try to reproduce the full-sized stand, here are some rough instructions and links to the 3D printable parts. Be warned that I’ve only built a single platform, and it was built incrementally as I found what worked and what didn’t. The instructions below may not work; they haven’t been tested because they skip over some of the dead ends in my original design!
Top (Rotating) Platform
-
Cut two plywood disks with 2’ diameter. The top one is the rotating platform, the bottom one is the stationary platform.
-
Buy this slip ring or one of the many clones on Amazon/eBay/AliExpress. Drill a hole in the center of the top (rotating) platform. Insert the slip ring through the hole with the screw heads on the bottom surface. Attach with wood screws.
-
Print the centering flange. Fit it over the slip ring and use 3 more screws to attach it to the bottom surface of the rotating platform.
-
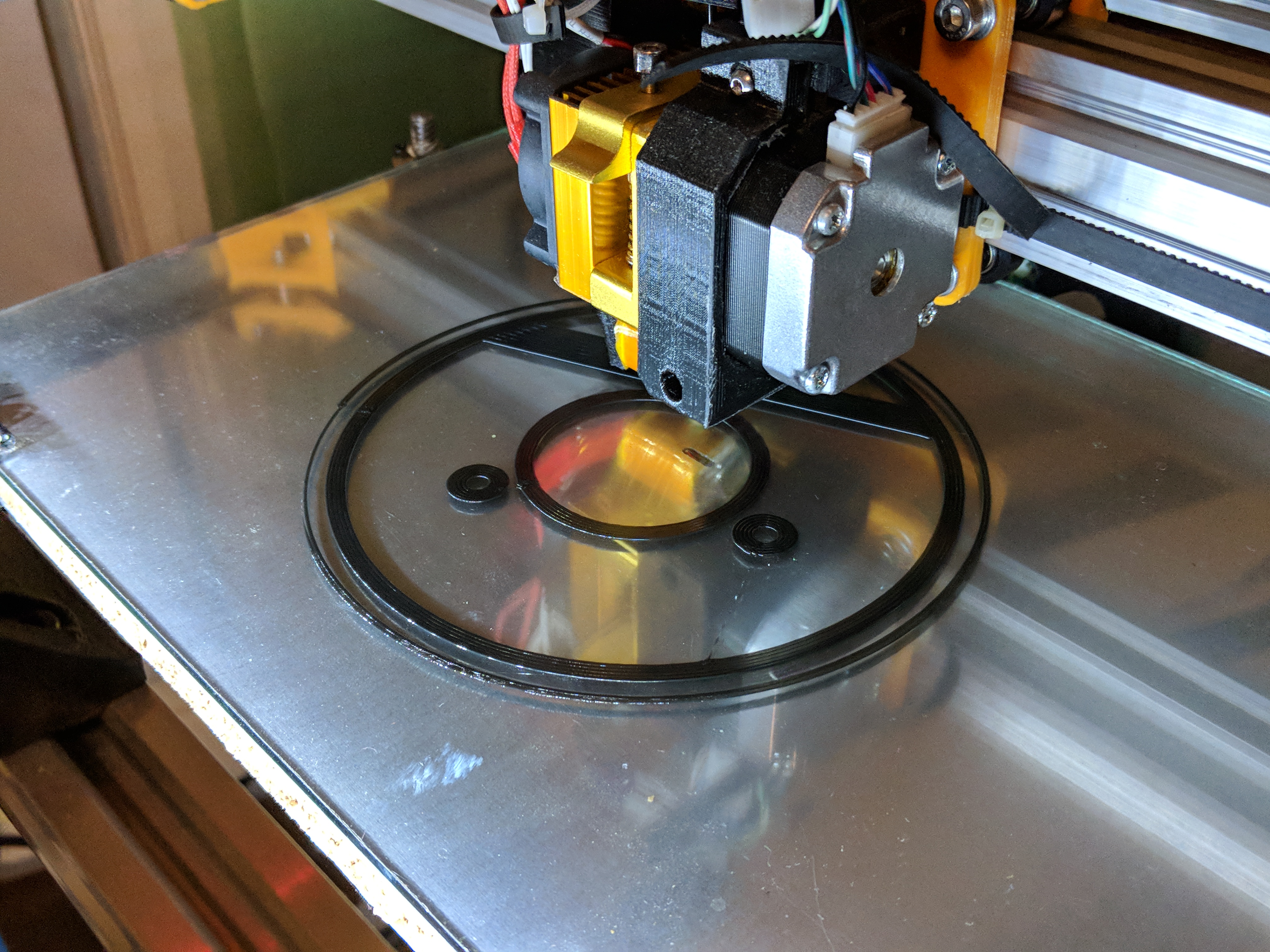
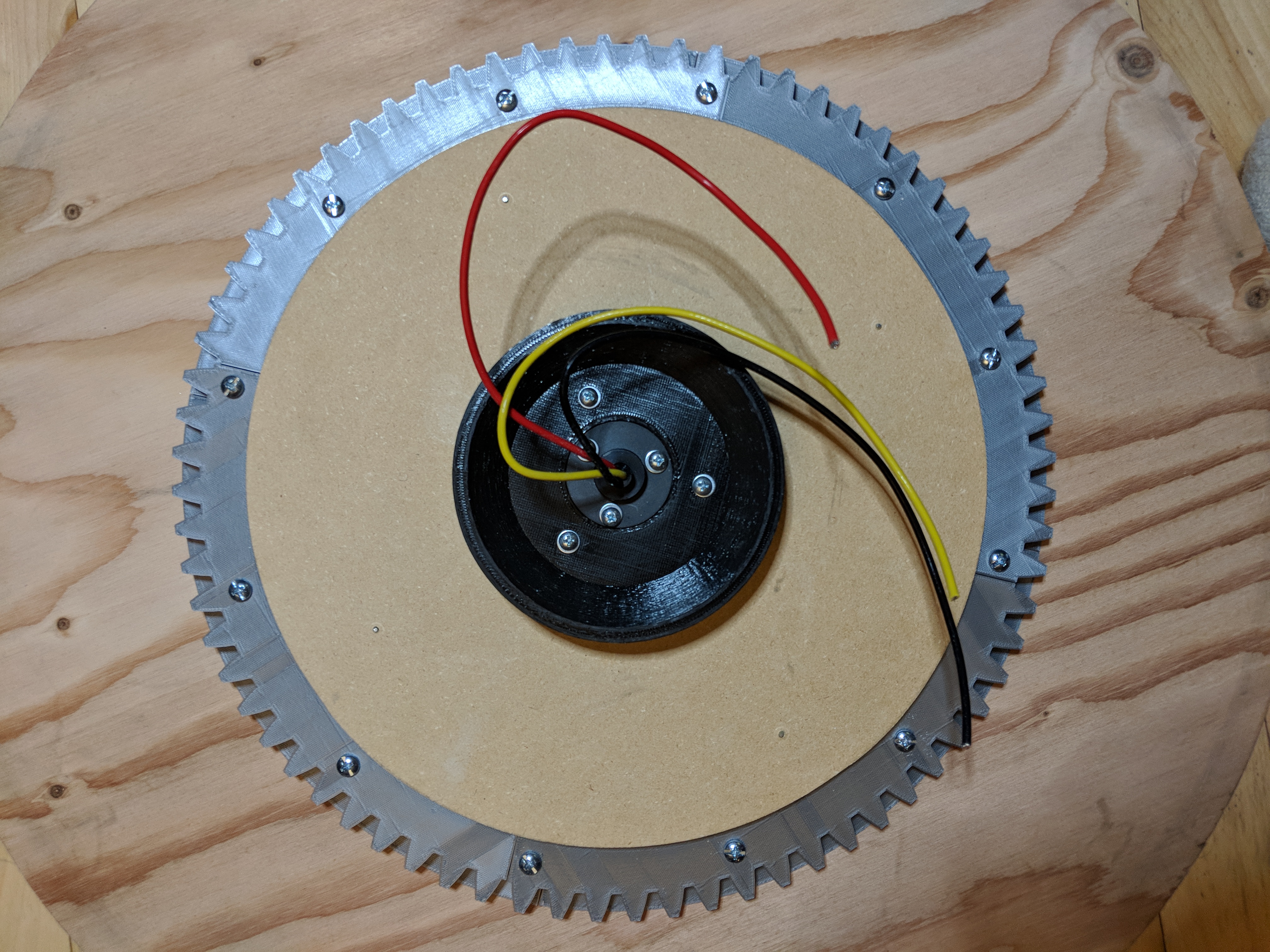
Print 4 copies of the ring gear. It’s split into interlocking quarters to fit the print area of my Prusa I3 MK3. Print it with supports due to the overhang. Attach all four to each other and to the bottom surface of the top platform using #8 wood screws. Take care to keep the ring centered with respect to the flange.
Bottom (Stationary) Platform
-
Attach 1.5” casters around the top perimeter of the bottom platform, wheels up, to bear the weight of the rotating platform.
-
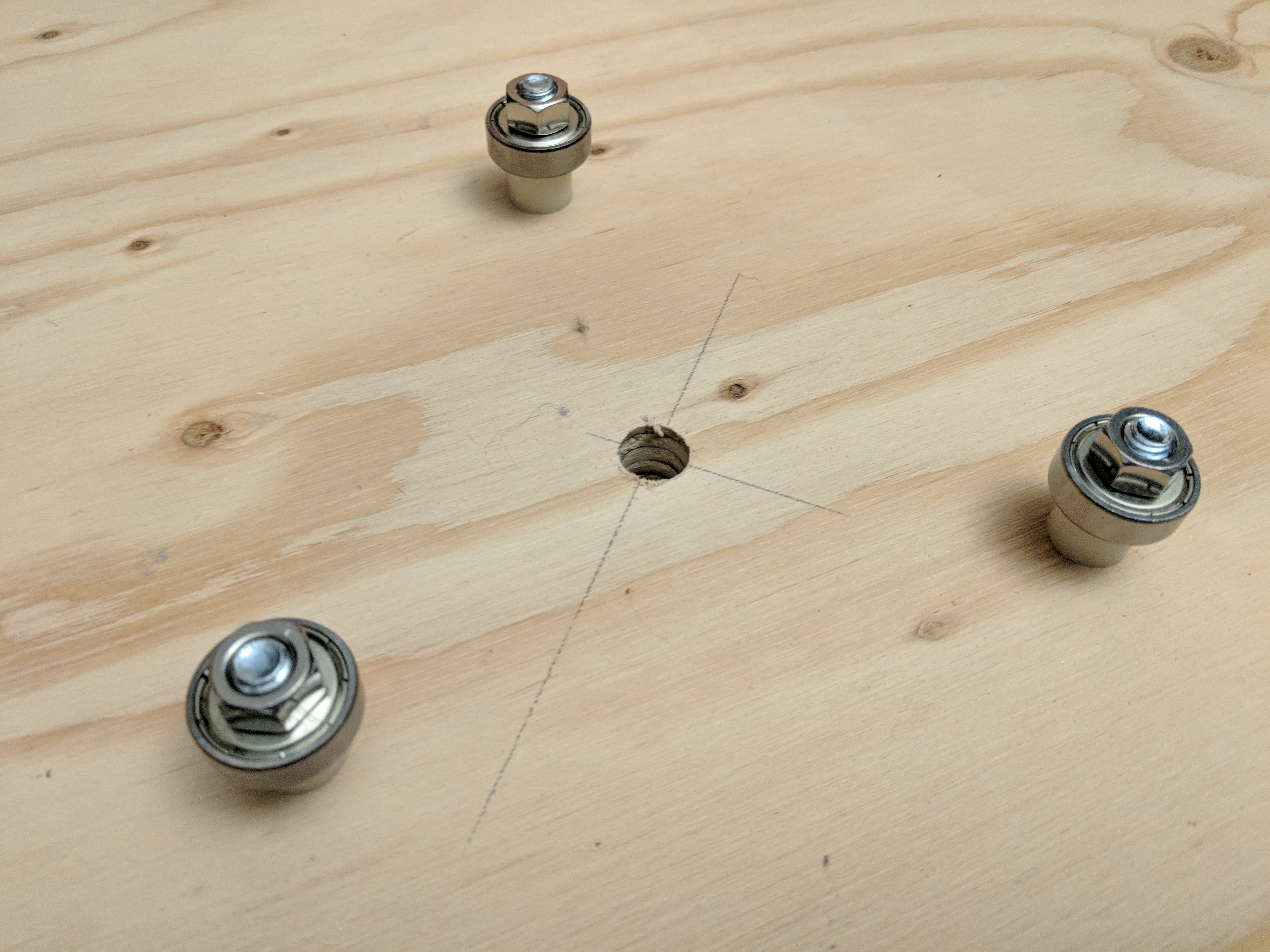
The centering flange will mate with 3 skate bearings on the bottom platform. Use standard 608ZZ skate bearings and a 5/16” bolt as each bearing’s axle. Drill 3 holes in the bottom platform in a radial pattern using a printout of this SVG as a drill guide. Insert each bolt through from the bottom. Add a nylon spacer (or a lot of washers) to raise the bearing to a height where it mates securely with the centering flange. Then add the bearing, and finally a nut to keep everything in place.
-
Drill a 2” hole through the center of the bottom platform for the slip ring’s wires to emerge out the bottom of the entire assembly and onto the floor.
-
Test the position of the holes by placing the rotating platform on the bottom platform, resting on the casters. The centering flange should mate with the skate bearings and should not touch the bottom platform.
-
Buy one of these uxcell gear motors. Uxcell sells about 15 variations of that gearmotor with identical form factor, but different gear ratios and voltages; buy any one you like, depending on how fast you want the platform to rotate. The 0.5 RPM motor variant ends up rotating the entire platform about 3 times per hour. Solder wires onto the motor and attach it to a power supply or PWM motor controller such as this one.
-
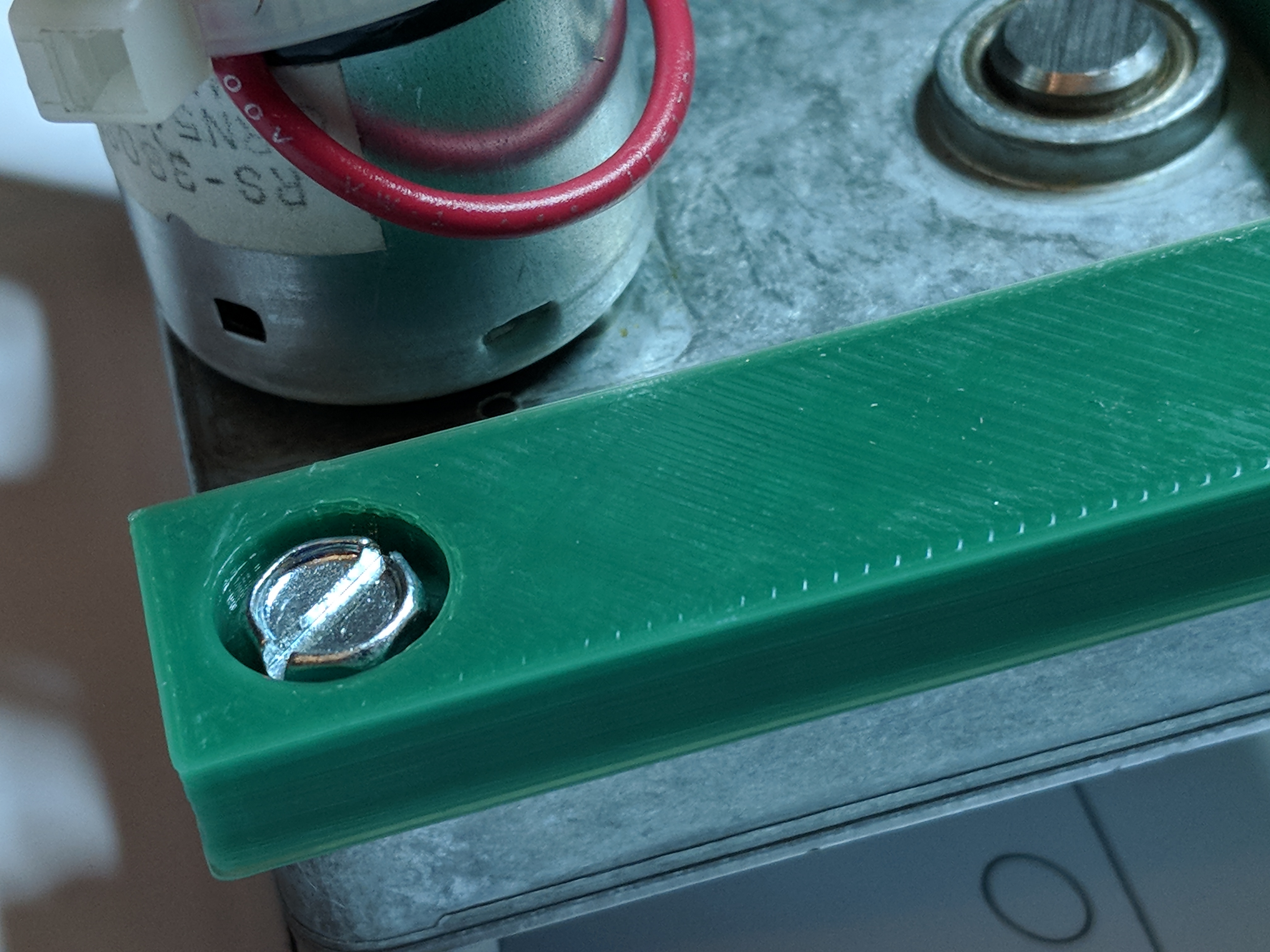
Print the motor mount and the cog. Attach the cog to the motor axle using a small set screw and the motor to the motor mount using 4xM3 machine screws.
-
Place the motor mount on the bottom platform such that it engages with the ring gear from the top platform. Remove the top platform, and, without moving the motor mount, mark the center point of the two side rails of the motor mount. Remove the motor mount and drill two holes for a 10-32 bolt.
-
Buy a few 2” high furniture feet (e.g. something like this) and attach to the bottom side of the bottom platform in a radial pattern that does not interfere with the motor.
-
Attach the motor to the bottom platform with the bolt heads at the top and threads emerging through the bottom and secure with butterfly nuts. The slides in the motor mount allow you to attach the motor to the bottom platform in the “retracted” position, put the top platform on, push the motor forward until it engages, then tighten the butterfly nuts with your fingers from below.
-
Turn on the motor controller, hopefully everything works!
{kind=link}
If you try to build one based on these instructions, please contact me! I’d love to know if it works!